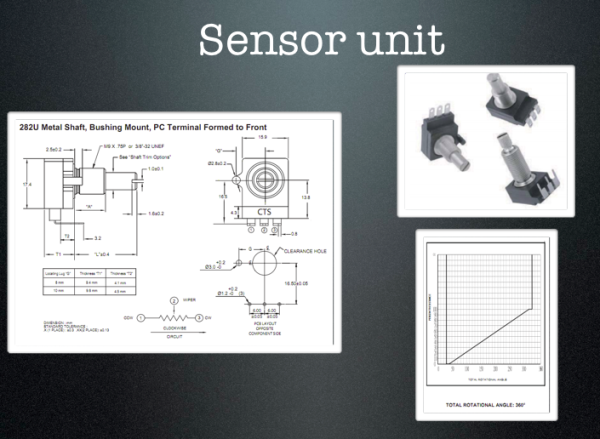
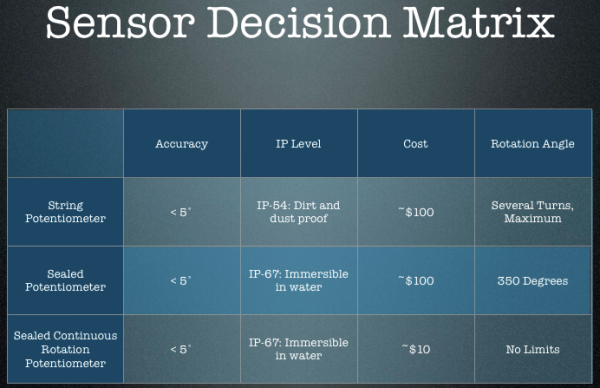
Stanley ordered and installed our gearing system and motor direction sensor. This system will work and hold up to the rugged conditions described described in our requirements. Specifically it has to hold up to the sun rain and bird shit.
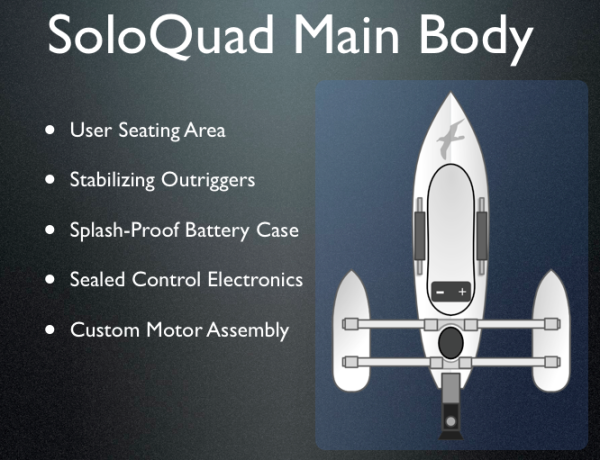
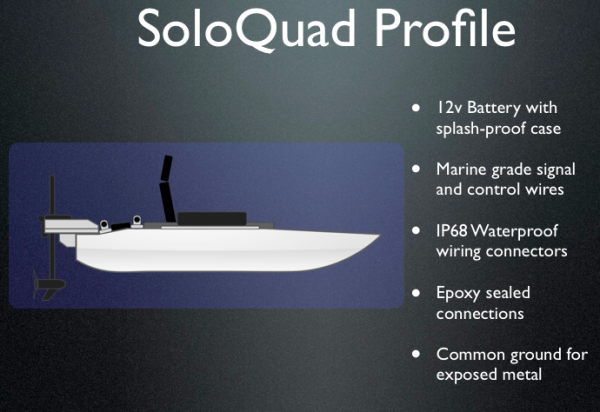
Brian, with his pervious marine craft experience, began water proofing work on the kayak. It will be done, once we get the new rubber cover Marian mentioned.
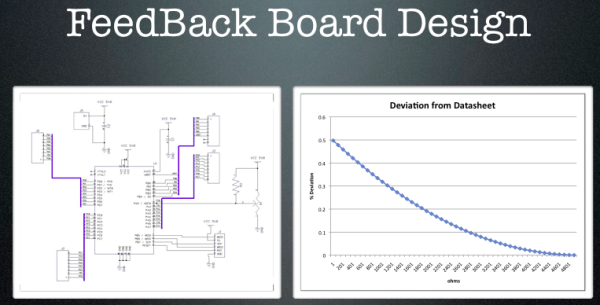
Igor is constructing a display panel for Bryan. It will have everything that Bryan requested, and also hold up to the conditions mentioned. We expect to finish this in the next few weeks.

I've installed a remote safety mechanism. There are two water resistant transmitters that can shut off the kayak. The device will work even submerged in water. Also the transmitter floats. I did this by repurposing a remote relay mechanism, to drive a 70A relay on the input power side. Of course this could create a possibility where the motor is in use and power is shut off, the still spinning motor would act as a generator creating a voltage spike going into the motor controller. This is called back EMF. The robotech controller board for the IGVC bot was damaged by back EMF, when they tested their remote stop. To prevent voltage spikes two 14V zener diodes were placed on the output nodes. This will clamp the output voltage to about 14V.
During our first water test a MOSFET overheated and failed, destroying the circuit board we've inherited from the previous team. After talking to Slivovsky, our team ordered replacement boards and began work on reconstructing the motor control circuitry. We finished enough for the software to begin programing.
Cailin and Austin, finished most the code for the kayak this afternoon. We now have direction control, forward and reverse control via the sip-n-puff. We are ready for water testing again.
We should give Austin special mention. He was invaluable in all aspects of the kayak project. We are not done, but a good number of hurdles have been completed.


 Roeurn Tourn
Roeurn Tourn